■■■■■ あっという間に年末になりそう ■■■■■
気づけば11月下旬、あっという間に年末になりそうです。呪術廻戦にドハマりしておりまする。
2021/11/23 by.tamako
『サイバーダインスタジオ』 [背損情報収集]
11月5日にOPENした『サイバーダインスタジオ』に行ってきました。

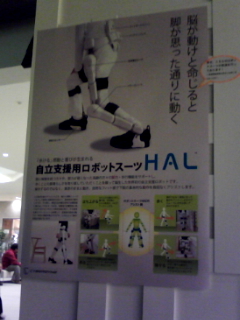
(↑画像:サイバーダインHPより)
この『サイバーダインスタジオ』は、世界最先端のロボットスーツテクノロジーの展示・体験があります。「ロボット技術」や「サイバニクス技術」がテーマです。
目的は、今までブログでも紹介した ロボットスーツHALの展示・トライアル。
ここで、HALトライアル・ラボでのデモンストレーションと装着体験の様子を報告!
(サイバーダインスタジオ内は撮影禁止。残念ながら画像なし)
★ HALトライアル・ラボ
ロボットスーツHALのデモンストレーションと装着体験を行うフィールド
※各回抽選により装着体験対象者を決定。(注意:土日祝日のみ)
【HALについて】
HALを実用化しようと研究開発、福祉での歩行補助が目的。
両脚用で11キロ、バッテリーで1時間駆動可能。
センサーユニット:皮膚上に発生する微弱電流をとらえる
↓
コントロールユニット:脳からの指令をモーターに伝える
↓
足を動かす という仕組み。
【装置体験の様子】
二人の人が、実際に装置を体験しました。
腕に電極パッドをつけて、両脚用のHALの膝から下部分を動かします。
腕を上げ下げすると、HALも同じように上げ下げしました。
体を実際に動かせなくても動かすイメージで足を動かすことができることの証明として、腕が曲がらないように固定。そして腕を動かすように力を入れると、HALがイメージ通りに上がったり下がったりしました。
HAL装置は、電極パッドを皮膚に付けて装着するだけなので、手術とかする必要がありません。
また、HALの重さは足の下にある装置に荷重がかかり、装着した人は装置の11キロを感じることはないそうです。片足立ちしても、片方に荷重がかかるようにしています。
・・・HALトライアルでは、こんなかんじでした。
実演が終わったあと、個人的に質問をしました。
そうしたら、私はサイバーダインHALの登録をしているので、実際にデモで体験させていただけることになりました♪(残念ながら足での体験は不可能で、トライアルでの装着体験と同じことをさせていただきました。)
腕の力こぶができるところと、腕を伸ばしたときに縮まる筋肉の部分に、電極パッドが貼られました。
腕を上にあげるとHALの足が上へ、下に下げるとHALの足が下へ下がりました。
動きはとてもスムーズで、なめらかでした。
次に、腕を曲げ伸ばしせずに、力を入れてみました。
すると、先ほどと同じように、HALの足が上へ下へ動きました!!
コツは、腕を曲げ伸ばしするときに使う筋肉を意識して、力を入れるとうまくいきました。力の入れ方のコツを覚えると、スーッスーッとすばやく力強く動きました。
このHALスーツは、いろいろと調節ができるそうです。
電極が感知する電流の感度や、動きの力強さを、コントロールすることができます。また、足の長さ調節も数段階できます。
そして、実際両脚用を足に装着するときのことを、詳しく聞きました。
電極パッドは、股関節と膝の上の体の表裏面に各2か所ずつ 合計片足8か所、皮膚に貼るそうです。
脊髄損傷の人が実際にHALをデモしたことがあるそうですが、個人差があるそうです。動く人もいる、という返答でしたが、HALの登録をしている人は、いずれ研究所本社等で実際に詳しくテストできるということです。(今はまだ個人向けリースはしていません)
また、HALハイブリットといって、2パターンの動かし方がるそうです。
ひとつは、上記にあるように生体電位で動かす方法。
もうひとつは、行動パターンを制御して動かす方法。
なので、実際に動かせなくても、もうひとつのパターンでなら、足を動かすことができるそうです。
HALを実際に体験してみて、HALのスムーズな動きに驚きました。そして、本当に腕を動かさなくても生体電位でHALが動くことがわかりました。最先端ロボット技術に期待が高まりました!早く、実際に装着して試してみたいです。
丁寧に説明してくださった研究者の方々、ありがとうございました。
もちろん、
「HALの実用化を心待ちにしているので、研究開発頑張ってください!」
とお願いして帰りました。
興味のある方は『サイバーダインスタジオ』に、ぜひ足を運んでみてください!
サイバーダインスタジオ
http://www.cyberdyne-studio.com/index.html
〒305-0817 茨城県つくば市研究学園C50街区1 イーアスつくば2F
(障害者手帳提示で、本人と介助者1名まで無料)
もちろん、サイバーダインスタジオがあるイーアスつくばは、バリアフリーです。
------------------------------
以下に、サイバーダインスタジオの展示にあったHALについての情報を、自分の言葉でメモしておきます。
【HALの仕組み】
命令→筋肉→活動電位→筋力
計測・解析から推定 筋肉信号を利用 生体情報に基づく。
皮膚表面 電極から非侵襲的に表面筋電位を計測
↓ シグナル
信号を増幅 フィルタリング
装着者の意図するトルクを推定して、トルクから制御を計算する
↓
装着者の筋力が生み出す動きを、一体的に関節駆動する
【Phase Sequence】
①動きのパターンを獲得、分解
②動きパターンをデータベース化してHALに組み込む
③Phase 再構成
------------------------------
(↑画像:サイバーダインHPより)
この『サイバーダインスタジオ』は、世界最先端のロボットスーツテクノロジーの展示・体験があります。「ロボット技術」や「サイバニクス技術」がテーマです。
目的は、今までブログでも紹介した ロボットスーツHALの展示・トライアル。
ここで、HALトライアル・ラボでのデモンストレーションと装着体験の様子を報告!
(サイバーダインスタジオ内は撮影禁止。残念ながら画像なし)
★ HALトライアル・ラボ
ロボットスーツHALのデモンストレーションと装着体験を行うフィールド
※各回抽選により装着体験対象者を決定。(注意:土日祝日のみ)
【HALについて】
HALを実用化しようと研究開発、福祉での歩行補助が目的。
両脚用で11キロ、バッテリーで1時間駆動可能。
センサーユニット:皮膚上に発生する微弱電流をとらえる
↓
コントロールユニット:脳からの指令をモーターに伝える
↓
足を動かす という仕組み。
【装置体験の様子】
二人の人が、実際に装置を体験しました。
腕に電極パッドをつけて、両脚用のHALの膝から下部分を動かします。
腕を上げ下げすると、HALも同じように上げ下げしました。
体を実際に動かせなくても動かすイメージで足を動かすことができることの証明として、腕が曲がらないように固定。そして腕を動かすように力を入れると、HALがイメージ通りに上がったり下がったりしました。
HAL装置は、電極パッドを皮膚に付けて装着するだけなので、手術とかする必要がありません。
また、HALの重さは足の下にある装置に荷重がかかり、装着した人は装置の11キロを感じることはないそうです。片足立ちしても、片方に荷重がかかるようにしています。
・・・HALトライアルでは、こんなかんじでした。
実演が終わったあと、個人的に質問をしました。
そうしたら、私はサイバーダインHALの登録をしているので、実際にデモで体験させていただけることになりました♪(残念ながら足での体験は不可能で、トライアルでの装着体験と同じことをさせていただきました。)
腕の力こぶができるところと、腕を伸ばしたときに縮まる筋肉の部分に、電極パッドが貼られました。
腕を上にあげるとHALの足が上へ、下に下げるとHALの足が下へ下がりました。
動きはとてもスムーズで、なめらかでした。
次に、腕を曲げ伸ばしせずに、力を入れてみました。
すると、先ほどと同じように、HALの足が上へ下へ動きました!!
コツは、腕を曲げ伸ばしするときに使う筋肉を意識して、力を入れるとうまくいきました。力の入れ方のコツを覚えると、スーッスーッとすばやく力強く動きました。
このHALスーツは、いろいろと調節ができるそうです。
電極が感知する電流の感度や、動きの力強さを、コントロールすることができます。また、足の長さ調節も数段階できます。
そして、実際両脚用を足に装着するときのことを、詳しく聞きました。
電極パッドは、股関節と膝の上の体の表裏面に各2か所ずつ 合計片足8か所、皮膚に貼るそうです。
脊髄損傷の人が実際にHALをデモしたことがあるそうですが、個人差があるそうです。動く人もいる、という返答でしたが、HALの登録をしている人は、いずれ研究所本社等で実際に詳しくテストできるということです。(今はまだ個人向けリースはしていません)
また、HALハイブリットといって、2パターンの動かし方がるそうです。
ひとつは、上記にあるように生体電位で動かす方法。
もうひとつは、行動パターンを制御して動かす方法。
なので、実際に動かせなくても、もうひとつのパターンでなら、足を動かすことができるそうです。
HALを実際に体験してみて、HALのスムーズな動きに驚きました。そして、本当に腕を動かさなくても生体電位でHALが動くことがわかりました。最先端ロボット技術に期待が高まりました!早く、実際に装着して試してみたいです。
丁寧に説明してくださった研究者の方々、ありがとうございました。
もちろん、
「HALの実用化を心待ちにしているので、研究開発頑張ってください!」
とお願いして帰りました。
興味のある方は『サイバーダインスタジオ』に、ぜひ足を運んでみてください!
サイバーダインスタジオ
http://www.cyberdyne-studio.com/index.html
〒305-0817 茨城県つくば市研究学園C50街区1 イーアスつくば2F
(障害者手帳提示で、本人と介助者1名まで無料)
もちろん、サイバーダインスタジオがあるイーアスつくばは、バリアフリーです。
------------------------------
以下に、サイバーダインスタジオの展示にあったHALについての情報を、自分の言葉でメモしておきます。
【HALの仕組み】
命令→筋肉→活動電位→筋力
計測・解析から推定 筋肉信号を利用 生体情報に基づく。
皮膚表面 電極から非侵襲的に表面筋電位を計測
↓ シグナル
信号を増幅 フィルタリング
装着者の意図するトルクを推定して、トルクから制御を計算する
↓
装着者の筋力が生み出す動きを、一体的に関節駆動する
【Phase Sequence】
①動きのパターンを獲得、分解
②動きパターンをデータベース化してHALに組み込む
③Phase 再構成
------------------------------
2008-11-30 21:10
nice!(1)
コメント(8)
相互リンクのみ受付けています。許可のない当ブログリンクは固くお断りします。

♪相互リンク♪
★へっぽこ院長 さん
へっぽこ院長の独り言
★ 0-samu さん
ダーリンのリハビリ日記
★TATUZOさん
絶対立ち上がるんだ!
★りょうパパさん
go!go!竜太郎。
★ドキンさん
どきん日和
★BOBBYクン
BOBBYクンのなんくるないさぁ~Part2
★tanosii50ccさん
車椅子利用者(下肢障害等)が運転可能な原付サイドカー
★はじめての車椅子生活!
車椅子ガイド
★里桜さん
永遠の幸せを・・・。
★y-tsukiさん
ほんまに Own Road。
★miomamaさん
miomama生活
★beerpapaさん
BeerPapaの脊髄損傷からの復活日記
★jibun さん
こころ...smile again♪
★taku-tyan さん
車椅子つれずれ記 脊髄損傷をかかえて 発ー飛駒
★ホセ さん
車椅子中。2nd
★フリークさん
車イス障害者フリークちゃんのポンコツ人生
★ふわっちさん
ふわっちのブログ
★だいちゃん さん
スピリチュアルカウンセラー&ナースなだいちゃんの頚損ブログ
★pekeponさん
pekeponのブログ
★はまゆさん
ばりあふりふり日記~きみといっしょにどこまでも~
★kimikimiさん
kimikimiのブログ
★こちゃさん
こちゃぶろぐ
★マンタンさん
マンタンの日記
★ナンバーナインさん
車椅子でもいいんじゃない?
★車イスユーザー(Moon Rider)のMizukiさんとジェフさんのブログ
Moon Rider 7 Project
相互リンクのみ受付。リンク希望とコメントください♪許可ない場合の当ブログリンクはお断りします。
★豊洲のトレーニングジム
ジェイ・ワークアウト

★Project Walk
(トレーニングジム本社)
Project Walk
★three's by Nail
(バリアフリーネイルサロン)
three's by Nail
★K-plus
(ココロのバリアフリー計画)
K-plus
★JDRA(日本障害者ライダーズ協会)
JDRA(日本障害者ライダーズ協会)公式ブログ
へっぽこ院長の独り言
★ 0-samu さん
ダーリンのリハビリ日記
★TATUZOさん
絶対立ち上がるんだ!
★りょうパパさん
go!go!竜太郎。
★ドキンさん
どきん日和
★BOBBYクン
BOBBYクンのなんくるないさぁ~Part2
★tanosii50ccさん
車椅子利用者(下肢障害等)が運転可能な原付サイドカー
★はじめての車椅子生活!
車椅子ガイド
★里桜さん
永遠の幸せを・・・。
★y-tsukiさん
ほんまに Own Road。
★miomamaさん
miomama生活
★beerpapaさん
BeerPapaの脊髄損傷からの復活日記
★jibun さん
こころ...smile again♪
★taku-tyan さん
車椅子つれずれ記 脊髄損傷をかかえて 発ー飛駒
★ホセ さん
車椅子中。2nd
★フリークさん
車イス障害者フリークちゃんのポンコツ人生
★ふわっちさん
ふわっちのブログ
★だいちゃん さん
スピリチュアルカウンセラー&ナースなだいちゃんの頚損ブログ
★pekeponさん
pekeponのブログ
★はまゆさん
ばりあふりふり日記~きみといっしょにどこまでも~
★kimikimiさん
kimikimiのブログ
★こちゃさん
こちゃぶろぐ
★マンタンさん
マンタンの日記
★ナンバーナインさん
車椅子でもいいんじゃない?
★車イスユーザー(Moon Rider)のMizukiさんとジェフさんのブログ
Moon Rider 7 Project
相互リンクのみ受付。リンク希望とコメントください♪許可ない場合の当ブログリンクはお断りします。
★豊洲のトレーニングジム
ジェイ・ワークアウト
★Project Walk
(トレーニングジム本社)
Project Walk
★three's by Nail
(バリアフリーネイルサロン)
three's by Nail
★K-plus
(ココロのバリアフリー計画)
K-plus
★JDRA(日本障害者ライダーズ協会)
JDRA(日本障害者ライダーズ協会)公式ブログ



こんにちは
後はいかに凡庸型を、一般の身体障害者が利用可能値段にしていくの
かが問題みたいですね。
アメリカでも復員傷病兵士などは優先的に無料で装着させているようで
すが、日本でも障害者本人用に、介護者装着補助具などと含め早く実
用化が待たれますね。
by はっつ (2008-12-02 10:38)
>はっつさん
いかに一般の障害者が利用できるようになるか、それが問題ですね。
補助具としての実用化が期待されます。
by tamako (2008-12-02 19:59)
こんにちは。
科学の進歩って早いですね。
街中をHALで普通に歩いてる人があちこちに見られるのを、想像したらわくわくします。
まるでガンダム…。ガンダム世代です。
バイク好きな私には、そんな感覚で操作したいな。
なんてわくわくしてます。
by ひろんきー (2008-12-03 19:51)
>ひろんきーさん
最先端の科学、すごいですよね。
私もデモでHALをつけて歩く人をみて、ちょっとワクワクしました♪
早く実用化して、誰でも試すことができるようになってほしいです。
by tamako (2008-12-04 20:02)
一日も早く低予算で実用化されるといいですね。
by duke (2008-12-06 17:11)
>dukeさん
低予算で実用化されることが、一番の望みです。
by tamako (2008-12-06 19:51)
昨晩の「ガイアの夜明け」でHALを扱っていました(^^)
何処かの病院でリハビリに導入するそうなので技術者の目線以外の目線からの見方が加味されてさらに改良が進むといいですね。
1ヶ月20万というのはまだまだ身近ては言いがたいですが...
by ころんぼ (2009-01-21 08:02)
>ころんぼさん
ガイヤの夜明け、見ていましたよ!
サイバーダインスタジオに行った時、技術者の方々は実用化&普及に向けて慎重に改良されているようでした。今は足の外につける装具ですが、いずれズボンの中とかに装着できるデザインにしていきたいと話していたのを思い出しました。1か月20万は、まだ手が届かないですね・・・。
by tamako (2009-01-21 15:57)